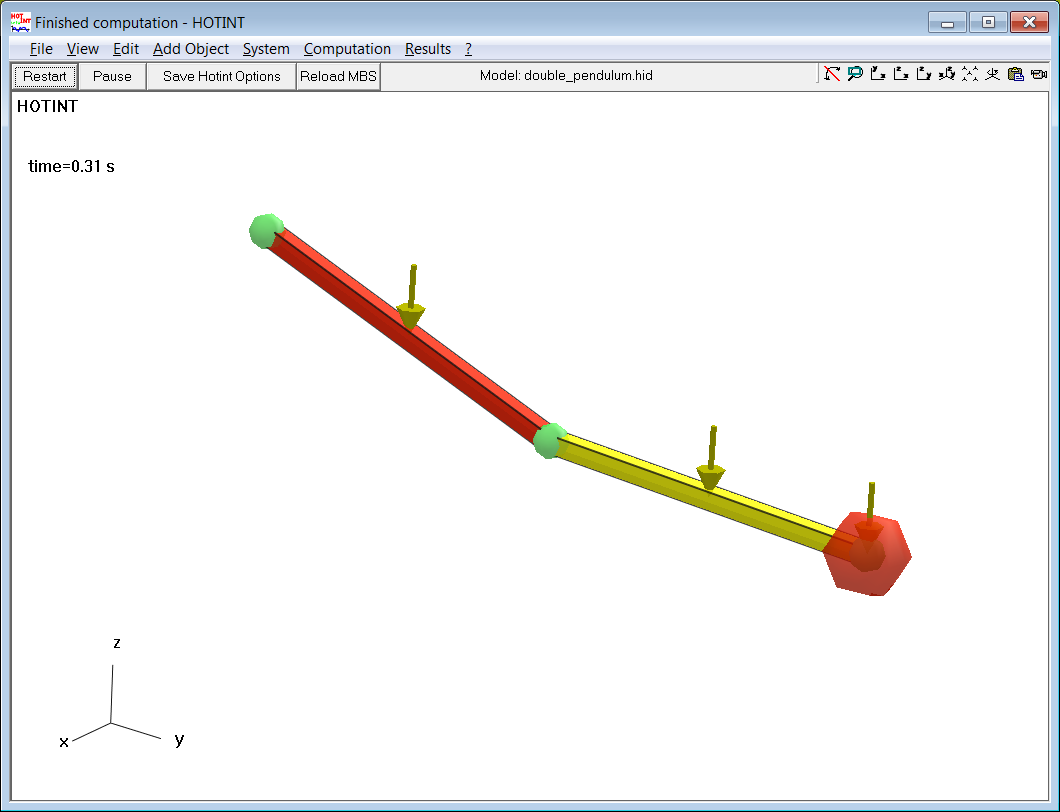
Double Pendulum
Description: A simple example for HOTINT beginners: The dynamic simulation of a double pendulum.
Keywords: rigid bodies, gravity, spherical joint, point mass
Download: Double Pendulum
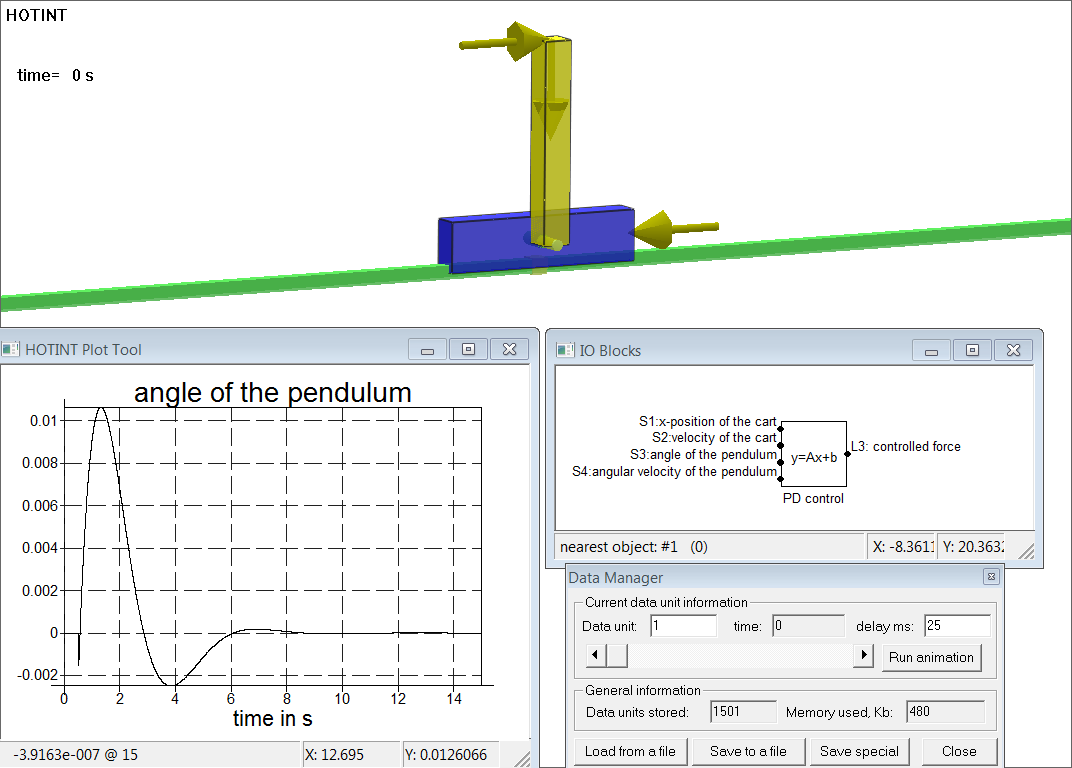
Balancing Cart
Descripion: In this example a PD controller is tested in a dynamic simulation. An inverse pendulum is mounted on a cart. The angle of the pendulum and the position of the cart are measured. These values are used by a controller to stabilize the pendulum by adjusting a force acting on the cart. The dynamic simulation shows the response of the mechatronic system to a disturbance.
Keywords: inverse pendulum, prismatic joint, gravity, control, mechatronic simulation
Download: Balancing Cart
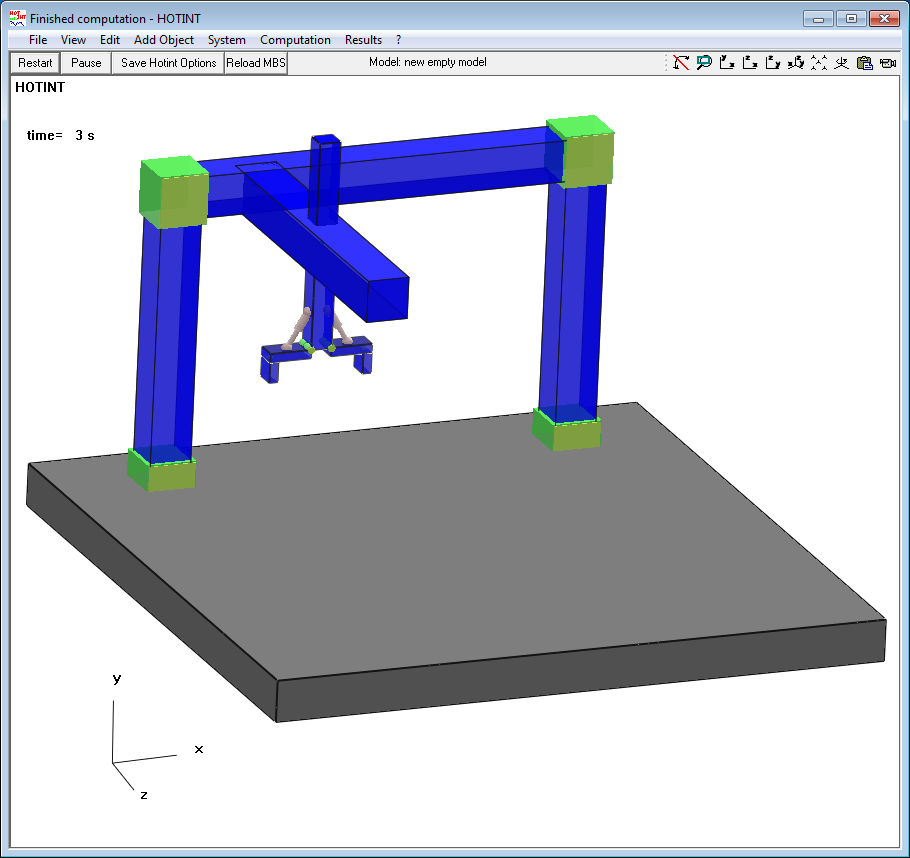
Flexible linear Robot
Description: In this example a full mechatronic system is simulated. The beams of the robot are modeled flexible in order to obtain the vibrations arising when the robot follows a predefined path. The flexible multibody system consists of 10 bodies and 21 constraints.
Keywords: rigid bodies, linear beams, prismatic joint, rigid joint, control
Download: Flexible Linear Robot





